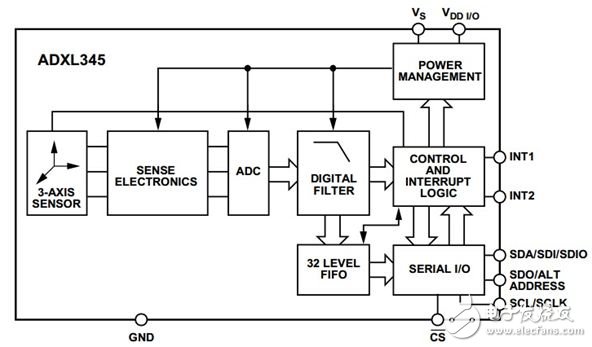
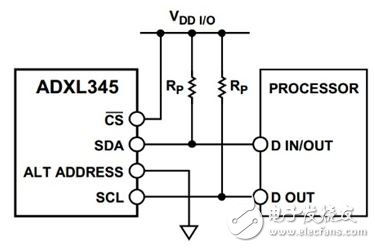
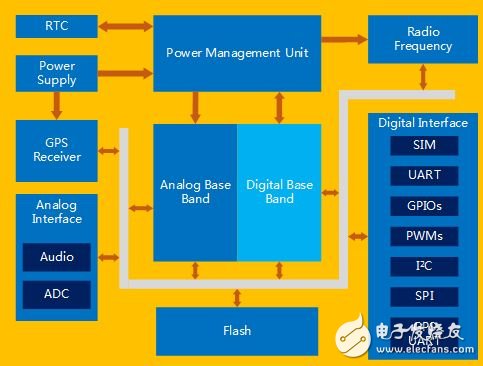
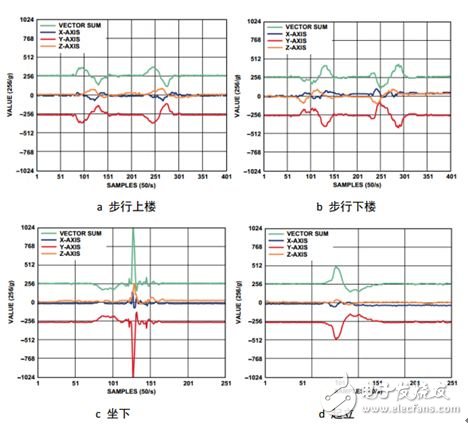
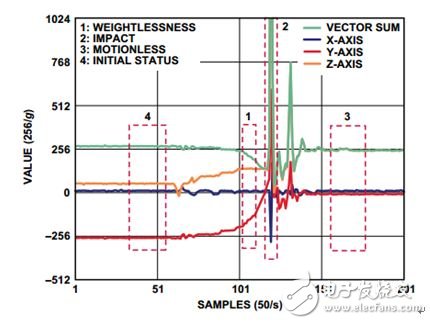
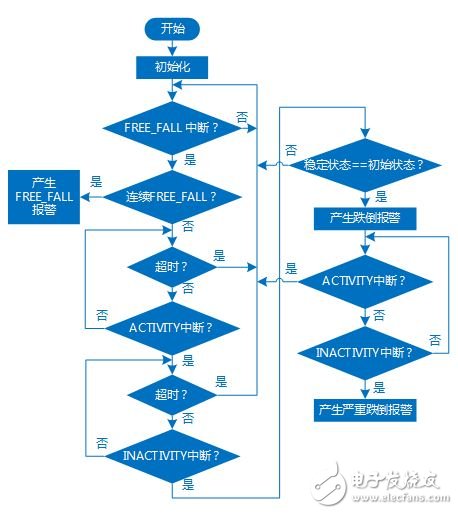
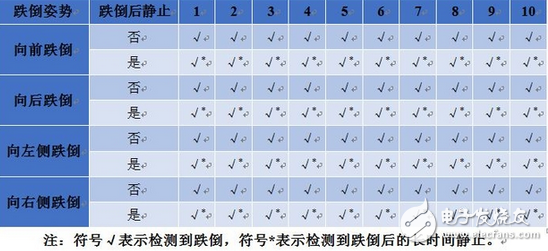
With the continuous improvement of human living standards, the aging of the population has become a global development trend. At present, China has entered an aging society [1], and the physical and mental health problems of the elderly have received more attention. Due to the aging of the physiological structure and the decline of bodily functions, the probability and frequency of accidental falls are very high [2]. Falling can cause bruises, fractures and even life-threatening of the body tissues of the elderly, and psychologically stress and fear for the elderly. In fact, many casualties were not caused by accidental falls, but because the elderly did not receive timely treatment after the fall [3]. In particular, there are a lot of blackmail in the society, which makes people afraid to lend a helping hand easily. Therefore, how to find out as soon as possible after the fall of the elderly, and send a distress signal for timely treatment has become particularly important. In order to live a healthier life for the elderly, it is of great research value and practical significance to study and design an elderly fall detection and alarm system. At present, there are many techniques for research and development of human fall detection systems, the most common being image analysis and acceleration analysis. Literature [4-6] is an indoor fall automatic detection system based on video image analysis. This technology has high accuracy and human body movements are clearly visible, but it requires multiple cameras to work at the same time, and exposes the user's personal privacy. The monitoring range is limited. It is also greatly affected by the environment. Another method of acceleration analysis is based on Micro-Electromechanical System (MEMS) sensors. MEMS technology has developed rapidly in recent years and is widely used in fall detection, state detection, motion detection and so on. Literature [7-9] uses MEMS technology to detect human fall. At present, some domestic MEMS-based fall detection can better achieve fall detection, but most of them are computationally intensive, complicated in design, expensive, and difficult to obtain. A wide range of applications. Design a fall detection and alarm system based on Arduino and three-axis accelerometer, collect real-time human acceleration parameters and geographical location information, and apply it to the elderly to report alarms after accidental fall. It has high cost performance, simple design, high real-time and low The power consumption and scalability of the experiment prove the feasibility and accuracy of the system. 1 overall system design The fall detection alarm system consists of Arduino minimum system, acceleration parameter acquisition module, GPS positioning module and GSM communication module. The system block diagram is shown in Figure 1. Figure 1 Block diagram of the fall detection alarm system The Arduino receives the acceleration value of the human body from the acceleration parameter acquisition module in real time. The MCU determines the wearer's posture after the fall detection algorithm through the received acceleration value. If the fall occurs, the fall alarm mechanism is triggered. When a fall occurs, the GPS positioning module can capture the specific geographic location of the wearer, and then issue an alarm for help information including the fall position, notify the wearer's guardian or medical institution for subsequent treatment. Under the premise of considering these functional requirements, the system uses Arduino as the control core, peripheral connection acceleration parameter acquisition module, GPS positioning module and GSM communication module to complete the functions of the whole system. 2 hardware design The hardware part mainly includes the selection of the minimum system of the microcontroller, the acceleration parameter acquisition module, the GPS positioning module, the GSM communication module, and the connection between the modules. 2.1 Arduino platform Arduino is an open source based electronic prototyping platform. Arduino consists of two main parts: the hardware part is a circuit board that can be used for circuit design. It is based on AVR series MCU and ARM microcontroller, and has rich peripheral interface and hardware resources. The software part is Arduino IDE. Program development environment in computers [10]. The modular design of the Arduino greatly simplifies the design process of the electronic system. Among them, the minimum system of the microcontroller is Arduino Uno, which is based on ATMEL's ATmega328P microcontroller hardware platform, with 32KB Flash, 1KB EEPROM, 14 digital input and output ports (6 of which can be used for PWM output), 6 analog inputs interface. At the same time, Uno presets the Bootloader program, does not require other external writers, and can download programs directly via USB. 2.2 Acceleration sensor ADXL345 The ADXL345 is a 3-axis, digital output accelerometer based on iMEMS technology recently introduced by Analog Devices. The ADXL345 features a wide range of variable measurement ranges, high resolution, high sensitivity, ultra-small package, ultra-low power consumption, standard I2C or SPI digital interface, 32-level FIFO memory, and multiple internal motion detection and flexibility. Characteristics of the interrupt mode [11]. All of these features make the ADXL345 greatly simplify the fall detection algorithm, making it an excellent acceleration sensor for fall detector applications. Figure 2 shows the functional block diagram of the ADXL345. Figure 2 ADXL345 functional block diagram The ADXL345 standard I2C digital interface can communicate easily with the Arduino Uno's I2C interface. The human triaxial acceleration data collected by the ADXL345 is transmitted to the MCU for fall detection algorithm processing. Figure 3 shows the typical I2C bus connection between the ADXL345 and the microcontroller. Figure. (CS) of ADXL345? The pin is tied high, indicating that the ADXL345 is operating in I2C mode. SDA and SCL are the data and clock lines of the I2C bus, which are connected to the corresponding I2C bus interfaces (A4 and A5) of the Arduino Uno. The INT1 pin of the ADXL345 is connected to the INT0 (Pin 2) of the Arduino Uno to generate an interrupt signal. Figure 3 I2C typical connection diagram between ADXL345 and microcontroller 2.3 GPS positioning and GSM communication module SIM908 The SIM908 is a chip that integrates a high-performance GSM/GPRS engine and a GPS engine. The GSM/GPRS engine can work in GSM 850MHz, EGSM 900MHz, DCS 1800MHz and PCS 1900MHz; GPS engine has first-class acquisition and tracking sensitivity, TTFF (TIme-To-First-Fix) and accuracy [12] These features can well perform the task of positioning the fall position and sending an alarm signal. GPS positioning and GSM communication functions can be completed simultaneously on the SIM908 chip, which can greatly reduce the number of system chips and power consumption. Figure 4 is a functional block diagram of the SIM 908. The SIM908 communicates with the Arduino Uno through the UART port. RXD and TXD are connected to Uno's TXD and RXD respectively to complete the GPS data capture and send GSM alarm SMS function in the fall position. Figure 4 SIM908 functional block diagram 3 algorithm design and experiment 3.1 Fall Detection Algorithm The research on the principle of fall detection is mainly to find the acceleration characteristics of the human body during the fall. Figure 5 shows the curve of acceleration during different movements, including (a) walking upstairs, (b) walking downstairs, (c) sitting down, and (d) standing up. The red curve is the acceleration curve of the Y-axis (vertical direction), which should be -1g in the normal stationary state; the black and yellow curves are the acceleration curves of the X-axis (front-rear direction) and the Z-axis (left-right direction), respectively. It should be 0g in normal quiescent state; the green curve is the vector sum of triaxial acceleration, which should be +1g in normal quiescent state. Figure 5 Acceleration curve during different motions Since the movement of the elderly is relatively slow, the acceleration does not change much during normal walking. The most obvious acceleration change is that there is a spike of more than 3g on the Y-axis acceleration (and the sum of the acceleration vectors) in the sitting motion, which is caused by the body coming into contact with the chair. The acceleration changes during the fall are completely different. Figure 6 shows the acceleration curve during an accidental fall. From the comparison of Fig. 6 and Fig. 5, it can be found that there are four main characteristics of the acceleration change during the fall, which can be used as the criterion for the fall detection. These four features are marked in red in Figure 6, which will be described in detail below. Figure 6 Acceleration curve during accidental fall Weightlessness: A certain weight loss occurs at the beginning of a fall. This phenomenon is more pronounced during the falling of the free fall, and the vector sum of accelerations is reduced to near 0g. For a general fall, a case where the combined acceleration is less than 1 g may occur. Therefore, this can be used as the first basis for the judgment of the fall state. Can be detected by the Free_Fall interrupt of the ADXL345. Impact: After losing weight, the human body will collide with the ground or other objects when it falls, and it will have a big impact in the acceleration curve. This impact can be detected by the AcXLvity interrupt of the ADXL345. Therefore, after the Free_Fall interrupt, the AcTIvity interrupt is generated as the second judgment basis for the fall state. Static: After the fall, that is, after the impact occurs, it is impossible to get up immediately, there will be a short state of rest (if the person is comatose due to a fall, or even a longer period of rest). On the acceleration curve, there will be a period of stability. This can be detected by the InacTIvity interrupt of the ADXL345. Therefore, the Inactivity interrupt after the Activity interrupt is the third judgment basis for the fall state. Compared with the initial state: after the fall, the human body will flip, so the direction of the human body will be different from the original standing posture. This makes the value of the triaxial acceleration in the static state after the fall different from that in the initial state, as shown in FIG. Therefore, the fourth basis of the fall detection is that the acceleration value and the initial state change in the static state after the fall, and the vector change exceeds a certain threshold. These four judgments are combined to form the entire fall detection algorithm, which can give an alarm to the fall state. In addition, if the fall has serious consequences, for example, it leads to a person's coma. Then the human body will remain still for a longer period of time. This state can still be detected by the Inactivity interrupt. In other words, if you find that you remain in the Inactivity state for a long time after the fall, you can give a serious alarm again. The flow chart of the algorithm is shown in Figure 7. Figure 7 algorithm flow chart 3.2 Experimental results This paper designs an experimental scheme to verify the algorithm. The experiment performed 10 tests on different forward postures such as falling forward, falling backward, falling to the left and right sides, and whether there was a long period of rest after the fall. Table 1 shows the relevant test results. Table 1 Experimental results This design combines the acceleration sensor ADXL345, GPS and GSM module SIM908 and Arduino Uno platform, collects the human body triaxial acceleration value through the acceleration sensor, detects the human body posture in real time, and completes the detection and alarm of human fall. The overall design has low cost, high reliability, low algorithm complexity, high detection accuracy and scalability, and has high practicability, which can meet the needs of human fall detection and alarm. Colorlight LED Display Control System Colorlight LED Display Control System,Colorlight Led Display Sending Card,Colorlight Sender Card,Colorlight Led Display Control System Shenzhen Macion Optoelectronics Technology Co.,Ltd. , https://www.macion-led.com